RFM69 OOK RSSI and optimal bitrate settings are key for proper reception and decoding of “foreign” OOK signals for example form remote controls as FS20, or wireless sensor such as Oregon scientific whether stations. In an earlier post, already some strange behavior of RSSI has been presented. A FS20 RC signal is recorded with 3 different bitrate settings in continuous OOK mode:
At high bitrates, the RSSI signal is much noisier. At 3000bps, the RSSI signal is hardly usable, although the internal bitslicer still can decode the signal, which has bit durations of 400 and 600us. So a too high bitrate will only lead excess noise.
From the 3000bps it can be seen that the RSSI signal is sampled with about 625us intervals. According to the datasheet, the RSSI sample duration depends on the duration of a bit:
t-rssi = 2 * t-bit
So for 3000bps, t-bit=333us, so t-rssi = 666us.
For 32768bps, the t-rssi=61us. As the RSSI signal is recorded with 25us intervals, most of the time two or three adjacent samples will have the same RSSI value.
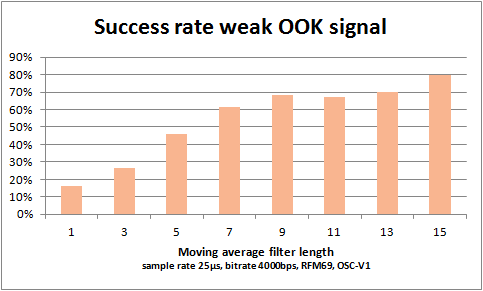
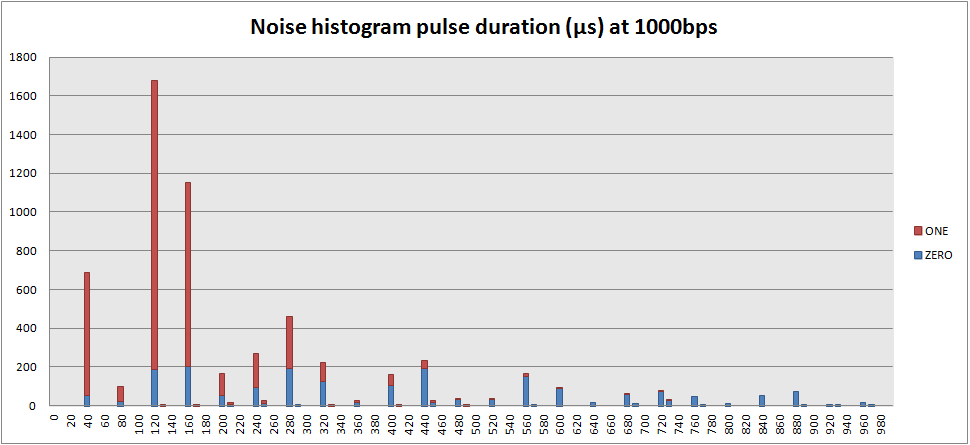
In an earlier post, it was explained that the internal bitslicer can slice at 1/25 of the bitrate. The fastest signals we want to see have bit duration (ON-time or OFF-time) of 200us (Some Oregon Scientific sensors). So then a low bitrate setting of around 1000bps will do?
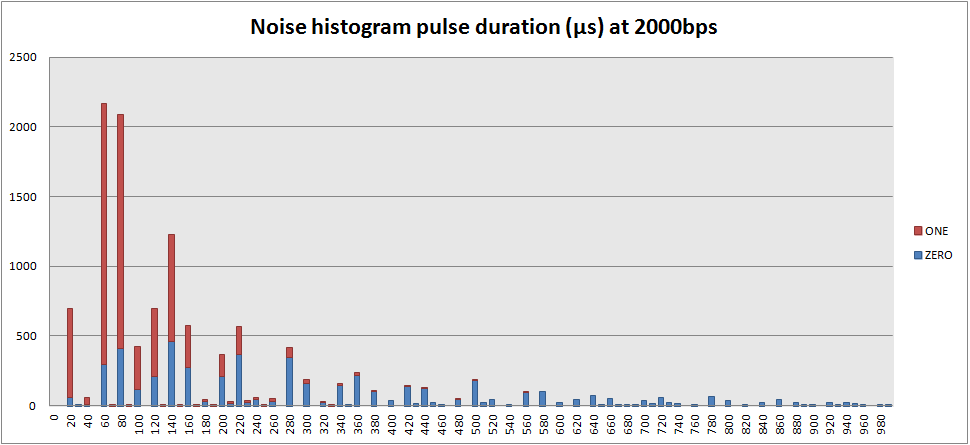
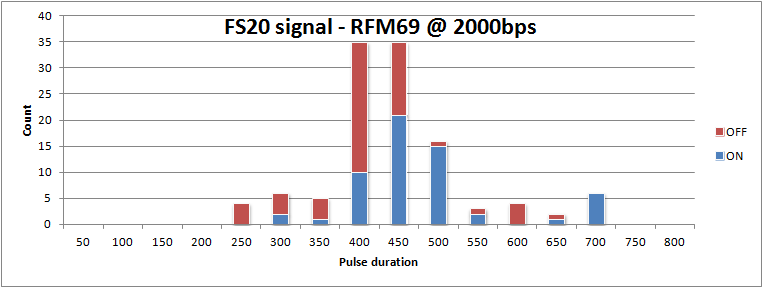
From further looking into exact timings or received signals, it appears that this is not true. When looking at a histogram of FS20 signals recorded with 2000bps, it can be seen that distributions of the 400us and 600us signals start overlapping. Also, the OFF-signals can be biased to shorter or longer durations, depending on the choice of OOK-PEAK or OOK-FIXED mode. As a result, the signal cannot be reliable decoded.
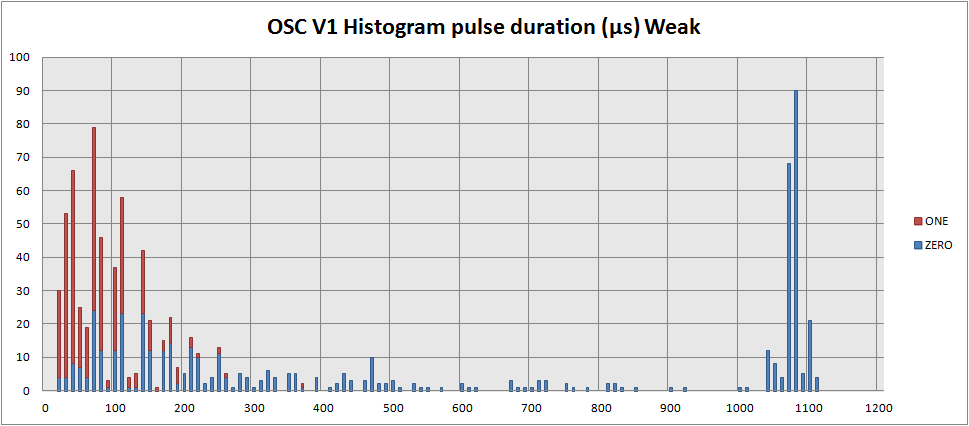
Now this is a bit messy. An ideal signal has both ON and OFF pulses taking either 400 or 600us:
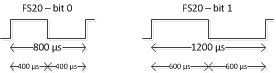
Deciding whether a bit is a zero or one, should simply testing whther the pusle duration is longer or shorter than 500us. Clearly that does not work. Also note it is an odd signal. It has many zero-bits, and only 11 one-bits.
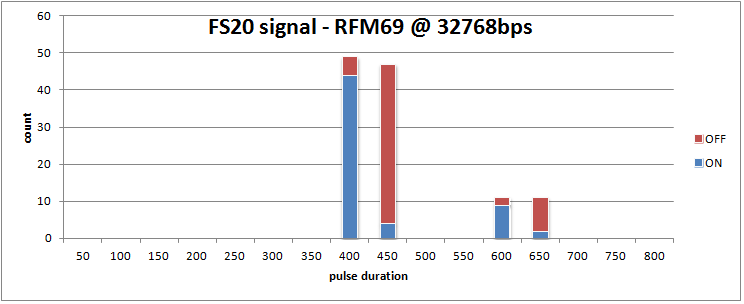
When moving to a higher bitrate (32768bps), the variation on the bit-timing is greatly reduced, and it also appears that the timing is hardly dependent on the OOK-PEAK or OOK-FIX setting.
In conclusion, the bitrate should be high enough for reliable bit timings, but not higher then needed, as a lower bitrate means a better noise filtering.